
智能駕駛賽道的競爭越來越激烈,參與的玩家越來越多:主機(jī)廠在爭取全棧自研,傳統(tǒng)Tier 1在加大投入,互聯(lián)網(wǎng)與科技公司紛紛入局,甚至傳統(tǒng)的一些代工廠和消費(fèi)電子廠商,也在布局智能駕駛業(yè)務(wù)。“越來越卷”,是今年智能駕駛業(yè)內(nèi)人士的共同感慨。
在激烈的競爭中,有的玩家利用先發(fā)優(yōu)勢,始終保持領(lǐng)頭羊的地位;有的玩家厚積薄發(fā),形成了自己的一套特色方案;但更多的玩家,在汽車智能化的浪潮中起起伏伏,始終難以拿出具有競爭力的智能駕駛產(chǎn)品,無法在市場中占據(jù)一席之地。
誠然,決定一家公司產(chǎn)品實(shí)力的因素中,資金實(shí)力、技術(shù)實(shí)力、公司規(guī)模等,是不可忽視的重要因素,但筆者認(rèn)為,對于智能駕駛來說,系統(tǒng)性的思維方式,是決定產(chǎn)品能否持續(xù)贏得市場的關(guān)鍵,也是區(qū)分一家公司是“正規(guī)軍”還是“雜牌軍”的重要標(biāo)志。
本文將從智能駕駛整體內(nèi)容出發(fā),通過功能場景、軟硬件開發(fā)、測試、安全等方面的案例,展開說明系統(tǒng)性思維對于智能駕駛的重要意義,以及如何在智能駕駛的開發(fā)過程中,貫徹系統(tǒng)性思維。
02 什么是智能駕駛的系統(tǒng)性思維
在回答“什么是智能駕駛的系統(tǒng)性思維”之前,我們先看一段對話——
A:“你們公司的智能駕駛,都有哪些功能?”
B:“自適應(yīng)巡航(ACC)、車道保持(LKA)、自動(dòng)泊車、自動(dòng)變道、AEB、前向碰撞預(yù)警、盲區(qū)監(jiān)測,還有一些其他的L2級功能,一共有20多種。”
A:“我看功能清單里沒有交通擁堵輔助功能,這個(gè)能做嗎?”
B:“目前沒有,但是我們可以后續(xù)升級。”
然后,就沒有后續(xù)了。
實(shí)際上,上面對話中A提到的交通擁堵輔助(TJA),就是低速場景中ACC與LKA功能的結(jié)合,既然B公司已經(jīng)開發(fā)出了ACC與LKA功能,那么實(shí)際上當(dāng)兩項(xiàng)功能同時(shí)開啟時(shí),就可以實(shí)現(xiàn)堵車場景的TJA功能。
因?yàn)橐庾R不到“通擁堵輔助功能其實(shí)已經(jīng)有了,只是沒有明確提出而已”,B白白丟錯(cuò)過了一個(gè)本來有可能拿下的訂單機(jī)會(huì)。
那么,B為何會(huì)“回答不恰當(dāng)”呢?
因?yàn)椋麤]有系統(tǒng)性思維。
所謂系統(tǒng)性思維,是一種從全局出發(fā)的結(jié)構(gòu)化思維方式,通過將一件事物看成一套整體的系統(tǒng),并研究系統(tǒng)中的各項(xiàng)元素及其相互間的作用和關(guān)聯(lián),讓事物體系化、結(jié)構(gòu)化,成為強(qiáng)邏輯性的有序系統(tǒng)。
系統(tǒng)性思維有如下特點(diǎn):
(1)著眼于系統(tǒng)全局,而不是單個(gè)因素。系統(tǒng)性思維方式在分析問題時(shí),會(huì)從系統(tǒng)全局出發(fā),找到與問題相關(guān)的所有因素,并分析各因素對問題的影響機(jī)制和程度,然后提出全局化的解決方法,避免以偏概全。
(2)層次分明,邏輯清晰。系統(tǒng)性思維作為一種結(jié)構(gòu)化思維方式,注重系統(tǒng)的層次和邏輯,在系統(tǒng)化思維方式中,系統(tǒng)是分層的,并且系統(tǒng)的各因素之間,存在包含、并列、因果等邏輯清晰的關(guān)聯(lián),一定是可解釋和可復(fù)現(xiàn)的。
(3)注重迭代與閉環(huán)。系統(tǒng)性思維是一種閉環(huán)思維和迭代思維,不會(huì)通過某一次的個(gè)別現(xiàn)象就做出判斷得出結(jié)論,而是有一個(gè)觀察、分析、論證、確認(rèn)和優(yōu)化的閉環(huán)過程,并在優(yōu)化過程中,完成對系統(tǒng)的迭代升級。
智能駕駛作為人工智能與汽車工程相結(jié)合的學(xué)科,所涉及的知識非常豐富,覆蓋的內(nèi)容也相當(dāng)廣泛,是多學(xué)科交叉融合的典型代表:計(jì)算機(jī)視覺、機(jī)器學(xué)習(xí)、人機(jī)工程、車輛動(dòng)力學(xué)、汽車設(shè)計(jì)等等。如此多的知識內(nèi)容,想要集成在智能駕駛中,以產(chǎn)品的形式呈現(xiàn)給用戶,必然需要有系統(tǒng)性思維,從面到線、從線到點(diǎn)、從整體到局部地去思考和應(yīng)用,否則難免出現(xiàn)考慮不周、缺失、重復(fù)等現(xiàn)象。
例如,在看待智能駕駛時(shí),非系統(tǒng)性思維的認(rèn)知是:
智能駕駛就是在車上加點(diǎn)傳感器,加個(gè)芯片,再把對應(yīng)的算法做出來,我們?nèi)ミx一款攝像頭,再選個(gè)差不多的雷達(dá),去和英偉達(dá)/地平線/黑芝麻談?wù)労献鳎僬矣薪?jīng)驗(yàn)的人開發(fā)一套算法,就差不多了。
我們常聽到傳統(tǒng)主機(jī)廠的人認(rèn)為“智能駕駛和之前的電子系統(tǒng)差不多,只是加了一堆傳感器,用了更高算力的芯片而已”;也常聽到消費(fèi)電子行業(yè)的人認(rèn)為“做智能駕駛和做手機(jī)差不多,無非是把手機(jī)變成車載控制器而已”。這些認(rèn)知都是因?yàn)槿狈χ悄荞{駛的系統(tǒng)性思考,只看到局部,看不到整體。
如果是系統(tǒng)性思維,就會(huì)有這樣的認(rèn)知:
智能駕駛的應(yīng)用場景是用戶出行場景,首先我們應(yīng)該看看用戶出行場景都有哪些,做好分類,再根據(jù)不同的出行場景,會(huì)調(diào)研用戶到底需要什么樣的功能,應(yīng)該做到什么程度;
為了實(shí)現(xiàn)這些功能,需要什么樣的硬件,需要什么樣的軟件算法;
如何測試和驗(yàn)證產(chǎn)品效果,保證安全性和可靠性。
并且會(huì)思考:
智能駕駛系統(tǒng)與汽車的其他模塊有哪些關(guān)聯(lián)?
如果出現(xiàn)沖突,優(yōu)先級如何考慮?
智能駕駛與車聯(lián)網(wǎng)可能會(huì)存在哪些交互,是否可能利用車聯(lián)網(wǎng)的數(shù)據(jù),做出更好的效果?
如今市場上的各種傳感器真的是必須的嗎?
什么情況下需要做安全冗余,做到何種程度?
CNCAP對AEB的測試場景,能夠滿足用戶日常出行的安全需求嗎?
可見,思維方式的不同,會(huì)導(dǎo)致認(rèn)知的不同,進(jìn)而影響智能駕駛的開發(fā)方法不同,以及產(chǎn)品的效果不同,最終體現(xiàn)就是市場的反饋不同。
用系統(tǒng)性思維開發(fā)智能駕駛,會(huì)讓智能駕駛成為一套系統(tǒng),呈現(xiàn)出體系化、結(jié)構(gòu)化的特點(diǎn),并且智能駕駛各項(xiàng)要素之間,會(huì)存在邏輯關(guān)系和關(guān)聯(lián)關(guān)系。
03 功能與場景是一套體系
從用戶層面來看,智能駕駛包含多樣化的應(yīng)用場景和多種功能,例如應(yīng)用于車道內(nèi)行駛場景的自適應(yīng)巡航ACC功能和車道居中LCC功能,應(yīng)用于變道場景的自動(dòng)變道功能,應(yīng)用于堵車場景的交通擁堵輔助TJA功能,應(yīng)用于高速公路場景的高速領(lǐng)航駕駛NOA功能,應(yīng)用于停車場景的自動(dòng)泊車APA等等。
功能與場景作為智能駕駛直接呈現(xiàn)給用戶的內(nèi)容,不是單獨(dú)存在的,而是一套完整的系統(tǒng),可以根據(jù)特定的分類標(biāo)準(zhǔn),分成不同的類別,再結(jié)合各項(xiàng)功能之間的關(guān)聯(lián),形成一套場景與功能體系。
04 硬件與軟件是一個(gè)整體
從整車架構(gòu)來看,智能駕駛是始終作為其中的一個(gè)模塊、或者說一個(gè)域存在的;智能駕駛相關(guān)的所有硬件與軟件,最終都是為了讓智能駕駛的效果達(dá)到預(yù)期,因此,智能駕駛的各類硬件與軟件,也不是獨(dú)立的,而是存在內(nèi)在關(guān)聯(lián),應(yīng)該整體布局,用系統(tǒng)性思維去開發(fā)。
智能駕駛包含豐富的硬件配置和多種軟件算法。硬件有各種傳感器如攝像頭、激光雷達(dá)、毫米波雷達(dá)、超聲波雷達(dá),以及多種芯片如SoC芯片、MCU芯片等,另外地圖和高精定位裝置,也可以看作廣義的傳感器;軟件有操作系統(tǒng)、中間件、以及各種算法如BEV視覺感知算法、PID控制算法等,并可以封裝成特定的功能算法如ACC算法、APA算法等。
如果用非系統(tǒng)性思維來設(shè)計(jì)5R1V的硬件方案,可能是這樣的:
“攝像頭精度要高,選個(gè)8M像素的;毫米波雷達(dá)只是輔助,選個(gè)市場主流的就可以;SoC芯片用國產(chǎn)化方案,地平線的就可以,J2和J3算力相差不大,用低成本方案J2就可以了。”
然后被告知J2芯片不適合處理8M像素?cái)z像頭的數(shù)據(jù),方案被推翻重來。
如果具備系統(tǒng)性思維,則會(huì)這樣考慮:
“5R1V最主要的是前向感知,比較一下我們現(xiàn)有的感知算法,應(yīng)用于2M攝像頭、5M攝像頭和8M攝像頭,效果相差有多大?”
“看來效果存在明顯差別,還是需要用8M攝像頭。處理8M攝像頭的數(shù)據(jù)需要多大AI算力?看看目前市場上有哪些合適的選擇?看起來地平線J3比較合適,有成熟案例,國產(chǎn)方案成本也有優(yōu)勢。”
“我們現(xiàn)在的視覺算法能不能實(shí)現(xiàn)測距?測距的精度怎么樣?前向測距對前向毫米波雷達(dá)的依賴程度如何?看來要和算法一起評估一下是否有必要選高性能的前向毫米波雷達(dá)。”
“有些功能是單獨(dú)依賴角毫米波雷達(dá)的,比如盲區(qū)監(jiān)測,因此,角雷達(dá)要選性能高一些的。”
這樣,5R1V方案中的每一個(gè)硬件需求和選型,都有理有據(jù),并且等達(dá)到整體的統(tǒng)一,能夠形成一套完整的系統(tǒng),而不是單獨(dú)存在的5個(gè)雷達(dá)+1個(gè)攝像頭+1個(gè)芯片。
在設(shè)計(jì)軟件方案時(shí),由于軟件算法的邏輯和參數(shù),能直接體現(xiàn)在功能和性能層面,因此更需要系統(tǒng)性思維。
以典型的Corner Case Cut-In為例:當(dāng)車輛在車道內(nèi)激活A(yù)CC時(shí),如果前方出現(xiàn)緊急Cut-In,那么自車應(yīng)該及時(shí)減速。產(chǎn)生的問題是:減速度應(yīng)該是多大?如果情況過于緊急,達(dá)到觸發(fā)AEB的要求,此時(shí)AEB與ACC之間的交互應(yīng)該是怎么樣的?ESC輸出的制動(dòng)力應(yīng)該如何變化?
如果缺乏系統(tǒng)性思維,可能根本不會(huì)意識到這些問題,只是將ACC和AEB作為2個(gè)單獨(dú)的算法模塊來開發(fā),直到問題暴露。
如果具備系統(tǒng)性思維,則在一開始就會(huì)定義好Cut-In場景觸發(fā)AEB時(shí),ACC的功能狀態(tài)和AEB介入的時(shí)機(jī),以及兩者對制動(dòng)力的詳細(xì)控制邏輯,實(shí)現(xiàn)制動(dòng)力的平穩(wěn)過渡,同時(shí)達(dá)到安全和舒適的效果。
系統(tǒng)性思維應(yīng)用于軟件方案開發(fā)的另一個(gè)典型案例是智能駕駛各項(xiàng)功能的開關(guān)設(shè)計(jì)。
嚴(yán)格地說,功能開關(guān)設(shè)置屬于人機(jī)交互,也就是智能座艙的開發(fā)內(nèi)容,但座艙中跟智能駕駛功能相關(guān)的開關(guān)設(shè)置,通常也需要智能駕駛的開發(fā)人員參與。
在早期的汽車機(jī)械化和電氣化時(shí)代,智能駕駛功能很少,ACC已經(jīng)算是比較先進(jìn)的功能,所以通常不會(huì)系統(tǒng)性地設(shè)計(jì)智能駕駛功能開關(guān),常規(guī)做法是有一項(xiàng)功能,就加一個(gè)開關(guān)項(xiàng)。
如今智能駕駛的功能多達(dá)30多種,如果仍按照之前的思路,那么可能會(huì)存在30多個(gè)開關(guān)選項(xiàng),這種情況在寸土寸金的車載屏幕中,顯然是不被允許的。此時(shí)就需要系統(tǒng)性思維,從全局思考如何設(shè)計(jì)智能駕駛各種功能的開關(guān):
對于法規(guī)強(qiáng)制要求的功能,可以默認(rèn)常開,無需開關(guān);對于同類型功能,可以統(tǒng)一成一個(gè)一級開關(guān),然后通過一級開關(guān),彈出二級開關(guān),例如將FCW與AEB統(tǒng)一為前向安全功能;對于存在包含關(guān)系的功能,分為兩級開關(guān),例如NOA功能開關(guān)下設(shè)置自主變道功能的開關(guān);對于用戶大概率不會(huì)更改設(shè)置的功能,可以隱藏,只保留一個(gè)統(tǒng)一入口供用戶做個(gè)性化設(shè)置。如圖1所示。
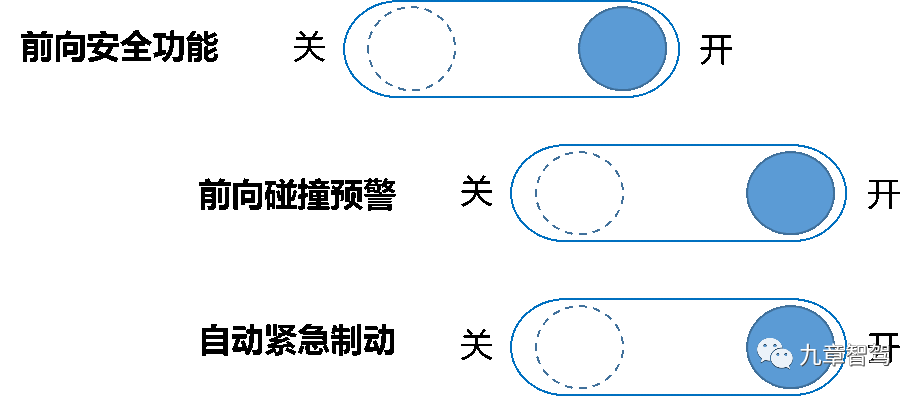
a) 同類型功能開關(guān)
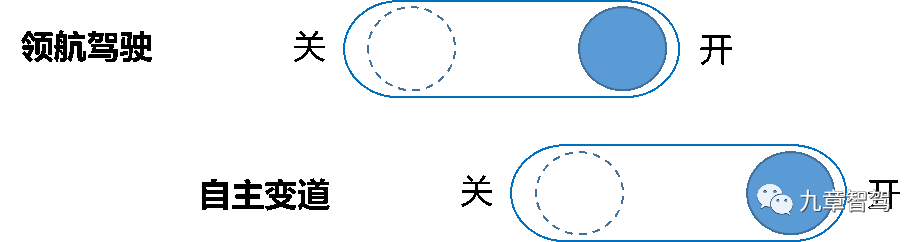
b) 包含關(guān)系的功能開關(guān)
圖1 功能開關(guān)示例
按照這種系統(tǒng)性地做法,智能駕駛的功能開關(guān)將得到極大簡化,并且最大程度地考慮到用戶使用的頻率和場景。對于開發(fā)來說,開關(guān)信號邏輯也更加清晰,不會(huì)產(chǎn)生多個(gè)功能的開關(guān)信號優(yōu)先級沖突的情況。
05 測試應(yīng)該全面覆蓋
經(jīng)常在發(fā)布會(huì)上聽到這類宣傳語:“我們的智能駕駛目前行業(yè)領(lǐng)先,全國領(lǐng)先,能夠達(dá)到XX公里零接管,已經(jīng)超越了特斯拉。”此時(shí)我們的疑問是:XX公里零接管的場景和工況是什么?能夠覆蓋哪些路段?零接管是在臺架測試階段的仿真結(jié)果,還是實(shí)車路試結(jié)果?所謂的超越特斯拉,是哪些場景下的哪些參數(shù)或者性能表現(xiàn)超越,還是說所有指標(biāo)都超越?
遺憾的是,目前沒有人能夠系統(tǒng)地回答這些問題,一種可能的情況是:這些玩家在高調(diào)宣傳的同時(shí),自己其實(shí)并沒有非常系統(tǒng)地去完成測試與驗(yàn)證工作,也缺乏系統(tǒng)性的思考:在什么階段,應(yīng)該測什么內(nèi)容?測試用例應(yīng)該怎么編寫,才能保證測試過程不重復(fù)、不遺漏?需要多少測試數(shù)據(jù),才能確保測試結(jié)果的可靠性?
需要經(jīng)過系統(tǒng)化的全面測試與驗(yàn)證,在不同階段,從不同維度去全方位地驗(yàn)證產(chǎn)品的效果,才能保證讓用戶滿意,并且符合法規(guī)和標(biāo)準(zhǔn)要求。
智能駕駛作為涉及到安全、可靠、舒適等多個(gè)評價(jià)維度的復(fù)雜產(chǎn)品,通常需要經(jīng)過軟件單元測試、軟件在環(huán)測試(Software-In-Loop,SIL)、硬件在環(huán)測試(Hardware-In-Loop,HIL,通常也可稱為臺架測試)、實(shí)車場地測試、實(shí)車道路測試、法規(guī)認(rèn)證等多個(gè)測試環(huán)節(jié),從軟件層、系統(tǒng)層、整車層等多個(gè)層面,逐一驗(yàn)證,以便及時(shí)發(fā)現(xiàn)問題,及時(shí)調(diào)整優(yōu)化。并且,在產(chǎn)品驗(yàn)證過程中,應(yīng)該有一套系統(tǒng)化的測試大綱和全面的測試用例,實(shí)現(xiàn)對智能駕駛產(chǎn)品的系統(tǒng)、全面測試。
智能駕駛的測試應(yīng)該是系統(tǒng)而完整的,應(yīng)該覆蓋所有可能的場景,并且對產(chǎn)品性能的測試應(yīng)該具有統(tǒng)計(jì)學(xué)意義,而不是僅通過個(gè)別幾次的測試結(jié)果,就對產(chǎn)品性能得出結(jié)論。
如果采用系統(tǒng)性思維,首先列出一套智能駕駛產(chǎn)品的所有應(yīng)用場景和功能,以及各項(xiàng)功能的性能要求;然后根據(jù)不同階段的測試邊界能力,安排不同的測試任務(wù);最后再根據(jù)產(chǎn)品和系統(tǒng)需求,以功能為單元,從全局考慮,編寫測試用例,形成測試方案,測試用例應(yīng)該注意合理性和可復(fù)現(xiàn)。
以系統(tǒng)性思維下的自動(dòng)泊車功能實(shí)車測試為例,自動(dòng)泊車分為檢測車位和泊入車位2個(gè)過程,有時(shí)還會(huì)有泊出車位的效果,那么自動(dòng)泊車的測試就應(yīng)該按檢測車位、泊入車位、泊出車位的過程,分別開展。
測試檢測車位效果時(shí),主要測試的是檢測成功率,應(yīng)該將目前所有常見的車位類型都列入測試用例,例如標(biāo)線車位的標(biāo)線有全封閉、半封閉、開口、角點(diǎn)等類型,空間車位的參照物有其他車輛和各種障礙物等,更詳細(xì)的車位類型介紹,可參考九章智駕之前的文章《特斯拉、小鵬、蔚來的自動(dòng)泊車產(chǎn)品測評》。然后根據(jù)不同的車位類型,分別多次測試自動(dòng)泊車的檢測效果,并分別統(tǒng)計(jì)各類車位的檢測成功率。
需要注意的是,成功率應(yīng)該具有統(tǒng)計(jì)學(xué)意義,不能僅僅以某幾次的測試結(jié)果去計(jì)算成功率,而是至少測試100次以上,才能得出具有統(tǒng)計(jì)學(xué)意義的結(jié)論。
另外,還要考慮天氣和光照的影響,也作為測試用例的一部分。
對于泊入車位和泊出車位的測試,應(yīng)該列出所有需要測試的參數(shù),例如成功率、用時(shí)、揉庫次數(shù)、泊車空間要求、平穩(wěn)性等等。一方面,應(yīng)該針對各項(xiàng)參數(shù),有針對性地制定測試用例;另一方面,測試結(jié)果也應(yīng)該具有統(tǒng)計(jì)學(xué)意義,例如測試得出的泊車用時(shí),不應(yīng)該是某一次泊車所用的時(shí)間,而應(yīng)該是多次泊車用時(shí)的均值。
06 安全應(yīng)該全方位
對于安全的片面認(rèn)知,是目前很多玩家缺乏系統(tǒng)性思維的典型代表。
曾聽不止一位同行說:“我們的智能駕駛功能肯定是安全的,因?yàn)橥ㄟ^了CNCAP的認(rèn)證。”甚至聽到過有些非汽車行業(yè)出身的高層建議:“反正都是SoC,我們也未必要用英偉達(dá)/地平線,用XX芯片(某消費(fèi)級芯片)應(yīng)該也可以,只要過了認(rèn)證就行,你們產(chǎn)品和研發(fā)一起評估一下。”
對基于這種認(rèn)知下所開發(fā)出的智能駕駛產(chǎn)品,我們的建議是:為了自身安全,碰都不要碰。
安全,作為智能駕駛區(qū)別于AI在其他行業(yè)應(yīng)用的一項(xiàng)關(guān)鍵特性,也需要系統(tǒng)性地考慮。
從目前來說,交通法規(guī)、NCAP、功能安全、預(yù)期功能安全等,已經(jīng)從多個(gè)方面對智能駕駛的安全性提出了要求;另外,用戶使用智能駕駛時(shí)的安全感受,也是安全性的一部分,這些應(yīng)該在智能駕駛開發(fā)時(shí)綜合考慮,并分解到相應(yīng)的功能需求和軟、硬件模塊中。
目前有很多法規(guī)和標(biāo)準(zhǔn),對智能駕駛的安全性提出了要求,耳熟能詳?shù)挠蠳CAP標(biāo)準(zhǔn)、ISO26262功能安全標(biāo)準(zhǔn)、ISO21448預(yù)期功能安全標(biāo)準(zhǔn)等等,以及容易被工程師,尤其是缺乏駕駛經(jīng)驗(yàn)的工程師所忽略的《道路交通安全法》。另外,智能駕駛作為車載模塊,也應(yīng)該嚴(yán)格遵守車規(guī)級的要求。

圖2 智能駕駛安全法規(guī)示例
因此,從系統(tǒng)性思維出發(fā),智能駕駛的安全,需要從各個(gè)維度綜合考慮,并且分解、落實(shí)到開發(fā)的相關(guān)內(nèi)容和目標(biāo)中,而不僅僅是通過了某項(xiàng)認(rèn)證、達(dá)到某個(gè)分?jǐn)?shù),就認(rèn)為安全已經(jīng)做好了。
07結(jié)語
以上,就是我們對智能駕駛的系統(tǒng)性思維的解讀,并從智能駕駛涉及的主要內(nèi)容,通過案例講述如何在智能駕駛產(chǎn)品開發(fā)中,貫徹系統(tǒng)性思維。除了本文列舉的案例外,智能駕駛與整車其他模塊的交互、智能駕駛的開發(fā)流程等,也應(yīng)該貫徹系統(tǒng)性思維。
可以說,系統(tǒng)性思維作為一種結(jié)構(gòu)化的全局思維方式,對于智能駕駛這類復(fù)雜系統(tǒng)工程,是非常適用且必要的。對于長期主義的玩家來說,長久且穩(wěn)定地保持智能駕駛產(chǎn)品競爭力和市場份額,一定是系統(tǒng)性思維主導(dǎo)開發(fā)的結(jié)果;并且,系統(tǒng)性思維,也是一家“正規(guī)軍”區(qū)別于“雜牌軍”的重要標(biāo)志。
轉(zhuǎn)自九章智駕
