
一、概述
新能源汽車在智能化進(jìn)程中,線控轉(zhuǎn)向系統(tǒng)(Steering By Wire,SBW)的應(yīng)用在其中扮演著重要角色,它徹底改變了傳統(tǒng)汽車的機(jī)械轉(zhuǎn)向方式,通過(guò)摒棄機(jī)械連桿結(jié)構(gòu),實(shí)現(xiàn)了從方向盤到車輪轉(zhuǎn)向執(zhí)行機(jī)構(gòu)間的信號(hào)傳輸和控制完全依靠電子信號(hào)來(lái)完成。該技術(shù)是汽車電氣化和智能化的重要組成部分,尤其對(duì)自動(dòng)駕駛汽車來(lái)說(shuō),更是不可或缺的關(guān)鍵技術(shù)。
二、原理與架構(gòu)
在SBW系統(tǒng)中,其主要涉及的節(jié)點(diǎn)按功能可分為感知層、控制層和執(zhí)行層三部分。其中感知層主要包括方向盤轉(zhuǎn)角傳感器、扭矩傳感器、車速傳感器、加速度傳感器以及角速度傳感器等。各傳感器為SBW提供的數(shù)據(jù)功能如下:
1)方向盤轉(zhuǎn)角傳感器:用于監(jiān)測(cè)方向盤的轉(zhuǎn)動(dòng)角度和轉(zhuǎn)速,以反映駕駛員的轉(zhuǎn)向意圖;
2)扭矩傳感器:測(cè)量駕駛員施加在方向盤上的力矩,用于模擬路感反饋;
3)車速傳感器:提供車輛當(dāng)前的速度信息,用于計(jì)算合適的轉(zhuǎn)向助力和動(dòng)態(tài)響應(yīng);
4)加速度傳感器和角速度傳感器:提供車輛動(dòng)態(tài)信息,如側(cè)向加速度、橫擺角速度等,幫助控制系統(tǒng)理解車輛狀態(tài);
5)其他:提供車輛狀態(tài)、道路等信息。
SBW的控制層即控制單元,它負(fù)責(zé)接收所有傳感器的數(shù)據(jù),并將其進(jìn)行預(yù)處理和融合,以確保數(shù)據(jù)的準(zhǔn)確性和完整性,基于數(shù)據(jù)結(jié)果,根據(jù)車輛狀態(tài)、駕駛員輸入和其他系統(tǒng)信息,計(jì)算出最優(yōu)的轉(zhuǎn)向角度和速度指令,并在系統(tǒng)運(yùn)行過(guò)程中處理故障診斷與執(zhí)行冗余控制策略。
SBW的執(zhí)行層可將其分為轉(zhuǎn)向執(zhí)行總成與路感模擬裝置兩部分,其中轉(zhuǎn)向執(zhí)行總成由轉(zhuǎn)向電機(jī)、減速機(jī)構(gòu)與轉(zhuǎn)向傳動(dòng)裝置構(gòu)成,其主要工作過(guò)程是通過(guò)轉(zhuǎn)向電機(jī)接收控制單元發(fā)出的指令,并執(zhí)行相應(yīng)的電機(jī)扭矩輸出,減速機(jī)構(gòu)和轉(zhuǎn)向傳動(dòng)裝置將電機(jī)的旋轉(zhuǎn)運(yùn)動(dòng)轉(zhuǎn)化為前輪的轉(zhuǎn)向動(dòng)作,從而實(shí)現(xiàn)車輛的轉(zhuǎn)向操作。
路感模擬裝置是在方向盤處安裝的力反饋機(jī)構(gòu),它根據(jù)控制單元的指令提供真實(shí)路感的模擬,以確保駕駛員能夠感知到轉(zhuǎn)向阻力和路面反饋。
基于上述基本原理,整理SBW的架構(gòu)示意如下:
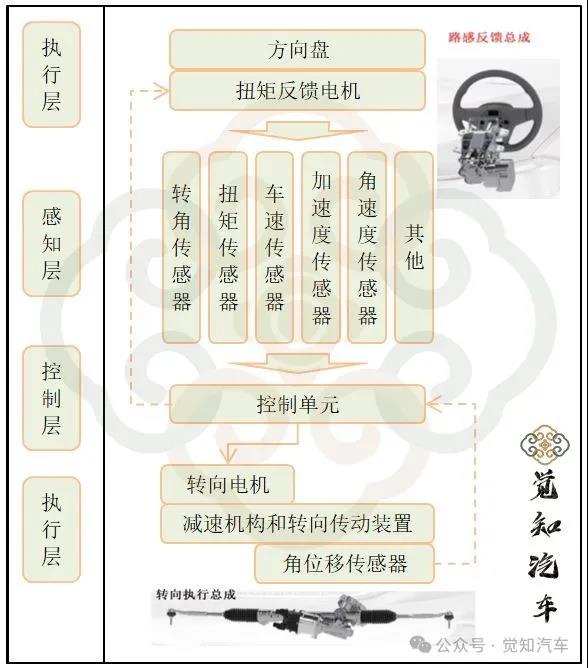
圖1 SBW架構(gòu)示意
三、系統(tǒng)工作流程
SBW功能實(shí)現(xiàn)的主要過(guò)程可分為數(shù)據(jù)采集與輸入、系統(tǒng)控制、系統(tǒng)執(zhí)行以及反饋模擬四個(gè)階段。當(dāng)駕駛員轉(zhuǎn)動(dòng)方向盤時(shí),內(nèi)置的角度傳感器和扭矩傳感器會(huì)實(shí)時(shí)捕捉到方向盤的動(dòng)作幅度、旋轉(zhuǎn)速度以及作用在其上的力度,并將這些物理量轉(zhuǎn)換成電信號(hào)。同時(shí)車身各處的狀態(tài)傳感器將會(huì)實(shí)時(shí)為系統(tǒng)提供車輛位置、速度、運(yùn)動(dòng)姿態(tài)和道路等信息。
控制單元在接收到上述傳感器的實(shí)時(shí)數(shù)據(jù)后,會(huì)結(jié)合車輛的行駛狀態(tài)、道路條件、駕駛員行為習(xí)慣以及可能激活的主動(dòng)安全功能進(jìn)行綜合分析。為使后續(xù)的計(jì)算過(guò)程準(zhǔn)確無(wú)誤,在收到原始數(shù)據(jù)后,控制單元會(huì)對(duì)其進(jìn)行預(yù)處理,即對(duì)這些數(shù)據(jù)進(jìn)行濾波、平滑處理等處理,以消除不必要的干擾,確保數(shù)據(jù)的質(zhì)量和準(zhǔn)確性。
對(duì)處理后的數(shù)據(jù)進(jìn)行融合時(shí),會(huì)再提取各個(gè)傳感器的互補(bǔ)信息,以進(jìn)一步減少不確定性和錯(cuò)誤影響。如,如果同時(shí)使用了多個(gè)角度傳感器,我們可能會(huì)采用卡爾曼濾波、貝葉斯估計(jì)等方法,結(jié)合它們的測(cè)量結(jié)果,估算出最可信的轉(zhuǎn)向角度。對(duì)于狀態(tài)信息的融合,會(huì)結(jié)合車輛動(dòng)力學(xué)模型,將不同來(lái)源的信息綜合起來(lái),如將駕駛員的轉(zhuǎn)向意愿與車輛實(shí)際行駛狀態(tài)(車身姿態(tài)、速度、輪胎抓地力等)結(jié)合起來(lái),以確定最佳轉(zhuǎn)向響應(yīng)。同時(shí),過(guò)程中還需要對(duì)每一條數(shù)據(jù)進(jìn)行有效性檢查,如有異常或超出合理范圍的數(shù)據(jù),將進(jìn)行剔除或采用備用數(shù)據(jù)源。
根據(jù)融合后的數(shù)據(jù)結(jié)果,控制單元會(huì)根據(jù)預(yù)定控制邏輯和實(shí)時(shí)工況、狀態(tài)進(jìn)行決策,如在自動(dòng)駕駛模式下,依據(jù)路線規(guī)劃、障礙物檢測(cè)結(jié)果等因素,決定是否需要調(diào)整轉(zhuǎn)向指令。
根據(jù)以上分析結(jié)果,控制單元將計(jì)算出理想的轉(zhuǎn)向角度、轉(zhuǎn)向速率或轉(zhuǎn)向力矩,并生成相應(yīng)的控制指令,再通過(guò)通信接口傳遞給系統(tǒng)的執(zhí)行機(jī)構(gòu)。在系統(tǒng)運(yùn)行過(guò)程中,控制單元會(huì)不斷監(jiān)控執(zhí)行機(jī)構(gòu)的響應(yīng)情況,并通過(guò)反饋機(jī)制對(duì)控制指令進(jìn)行實(shí)時(shí)調(diào)整,確保系統(tǒng)達(dá)到預(yù)期的控制效果,同時(shí)也為駕駛員提供仿真或增強(qiáng)的真實(shí)駕駛感受反饋。
對(duì)此數(shù)據(jù)處理及控制過(guò)程的流程進(jìn)行示意,如下:
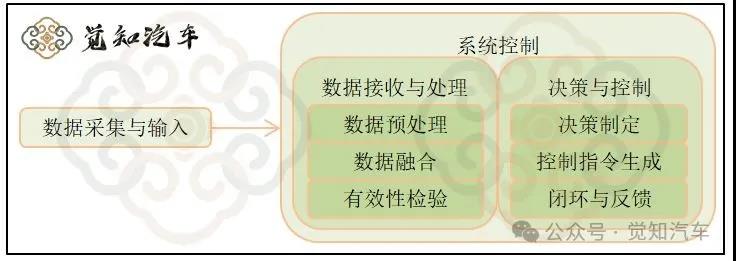
圖2 SBW數(shù)據(jù)處理與控制示意
在決策與控制階段,為了確保計(jì)算出的轉(zhuǎn)向角、轉(zhuǎn)向速率等參數(shù)與實(shí)際需求相符,通常系統(tǒng)會(huì)執(zhí)行多項(xiàng)關(guān)鍵步驟:首先基于車輛相關(guān)模型,預(yù)測(cè)車輛對(duì)于不同轉(zhuǎn)向指令的響應(yīng),確保計(jì)算出的控制參數(shù)能引導(dǎo)車輛按照預(yù)期軌跡行駛,同時(shí)使用相關(guān)控制策略,根據(jù)系統(tǒng)當(dāng)前狀態(tài)和目標(biāo)狀態(tài),快速、準(zhǔn)確地計(jì)算出控制量,使車輛在各種工況下都能保持良好的穩(wěn)定性及跟蹤性能。
在系統(tǒng)運(yùn)行過(guò)程中,考慮到傳感器數(shù)據(jù)可能存在誤差,會(huì)采用數(shù)據(jù)融合技術(shù)和傳感器誤差補(bǔ)償算法來(lái)提高測(cè)量精度,從而使得基于這些數(shù)據(jù)計(jì)算出的控制指令更為可靠。并通過(guò)閉環(huán)控制系統(tǒng),實(shí)時(shí)監(jiān)測(cè)實(shí)際車輛狀態(tài)與期望狀態(tài)之間的偏差,根據(jù)偏差信息不斷調(diào)整控制指令,形成一個(gè)迭代優(yōu)化的過(guò)程,直至達(dá)到或者接近預(yù)設(shè)的目標(biāo)狀態(tài)。
對(duì)此提高計(jì)算結(jié)果的過(guò)程示意如下:
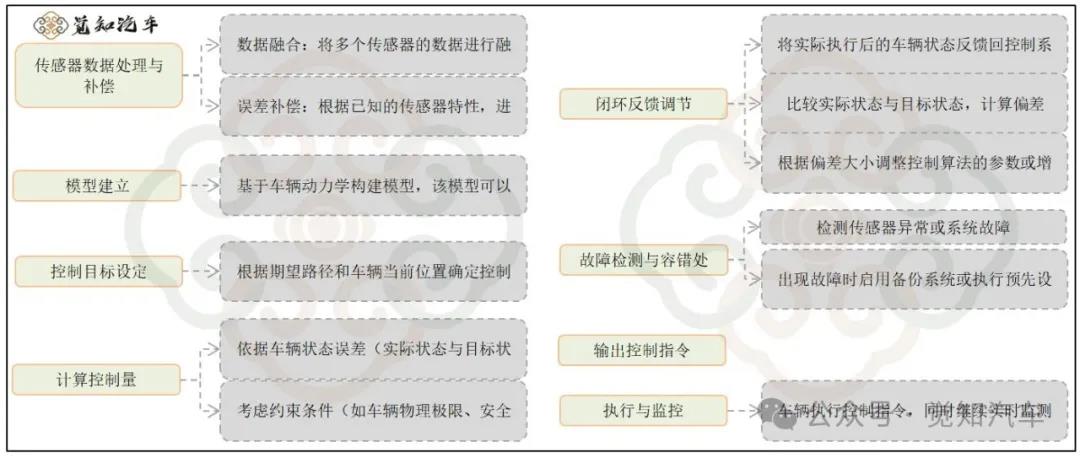
圖3 SBW決策與控制計(jì)算過(guò)程示意
最后控制單元將計(jì)算出的轉(zhuǎn)向指令轉(zhuǎn)化為驅(qū)動(dòng)信號(hào),再傳輸給位于轉(zhuǎn)向系統(tǒng)的電動(dòng)機(jī),電動(dòng)機(jī)在接受到信號(hào)后,將產(chǎn)生相應(yīng)的驅(qū)動(dòng)力,通過(guò)齒輪或其他傳動(dòng)機(jī)構(gòu)改變前輪的實(shí)際轉(zhuǎn)向角度,從而實(shí)現(xiàn)車輛的轉(zhuǎn)向控制。
轉(zhuǎn)自覺(jué)知汽車
