
在軟件定義汽車這個時代,汽車功能越來越豐富,隨之ECU越來越多,有些功能靠ECU獨立實現(xiàn),有些功能則需要多個ECU聯(lián)合實現(xiàn)。總體來說,ECU絕大多數(shù)情況下都需要與其他ECU進行信息交互,比如充電功能,車載充電機OBC需要聯(lián)合電池管理系統(tǒng)BMS和整車控制器VCU等聯(lián)合才能實現(xiàn)。因此,這些ECU采取怎樣的通訊方式來實現(xiàn)信息交互?目前,常用的ECU通訊方式有 CAN,LIN和FlexRay,同時隨著汽車電子電器架構(gòu)朝著中央集成控制方向發(fā)展,以太網(wǎng)的應(yīng)用也越來越廣泛。
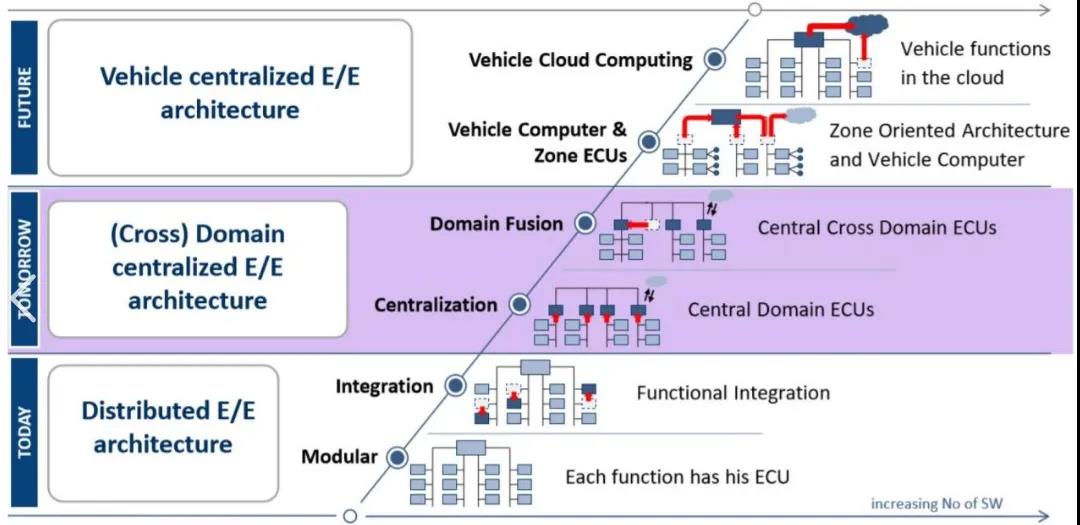
source:the software Car: Building ICT Architectures for Future Electric Vehicles
當然不管汽車電子電器架構(gòu)發(fā)展多么迅速,CAN通訊仍將無處不在,持續(xù)對ECU之間的信息交互扮演著極其關(guān)鍵的角色。因此,本文從ECU系統(tǒng)層級角度來探討CAN通訊都會有怎樣的需求,以及如何去理解與評估這些需求。
#01 CAN通訊需求的分析與分解
汽車ECU基本都采用V流程開發(fā),先由OEM提供功能開發(fā)需求,然后經(jīng)過ECU系統(tǒng)的分析與評估,再分配給ECU軟硬件進行相應(yīng)的開發(fā)與驗證,最后由系統(tǒng)進行驗證和確認。
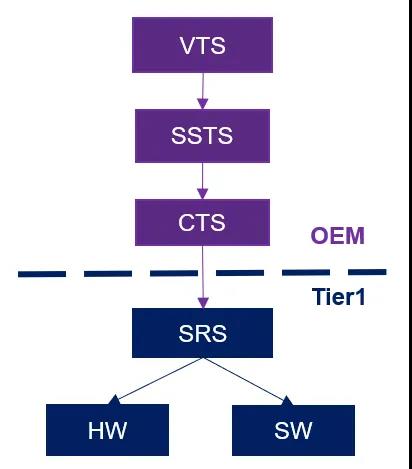
Source: 一文了解汽車功能開發(fā)要做什么?怎么做?
本文將側(cè)重點在ECU系統(tǒng)層面視角來看這些CAN通訊需求。通常ECU系統(tǒng)收到在客戶關(guān)于CAN通訊的需求會涉及以下幾個點:
- ECU需要具備幾路CAN,每路CAN的基本要求是什么;
- 每條CAN需要具備哪些功能;
- CAN通訊矩陣或DBC是怎樣的。
這些需求就是ECU CAN通訊開發(fā)的起點,一般稱為客戶需求或者利益相關(guān)者需求Stakeholder requirement。在ECU系統(tǒng)層面,系統(tǒng)工程師收到這些需求后,會拉上相關(guān)利益者一起來評估這些需求,包括硬件,軟件和功能安全等項目內(nèi)部成員,同時也會和客戶多次對齊,最終明確好這些CAN通訊需求。
接著系統(tǒng)工程師將在ECU系統(tǒng)層面將需求細化為ECU系統(tǒng)需求,比如:
- ECU需要兩路CAN,CAN1用于ECU之間的信息交互,CAN2用于診斷和標定;
- 兩路CAN都為CAN FD,仲裁段波特率500Kbps,數(shù)據(jù)段波特率為2Mbps,采樣點均為80%,都支持標準幀和擴展幀格式;
- CAN1需要根據(jù)已提供的CAN通訊矩陣或DBC進行開發(fā);
- CAN1需要支持特定幀報文喚醒,支持局部網(wǎng)絡(luò)喚醒功能等。
當然需求細化分解出來了很重要,但有沒有徹底吃透呢?接下來我們就再進一步來探討。
#02 如何理解CAN通訊需求
就系統(tǒng)工程師的經(jīng)歷來說,當看到這些需求,一方面要理解需求本身,另一方面需要知道這些需求將會涉及的相關(guān)利益方。下面我們就逐一解析上面所列舉的CAN通訊需求。
2.1 ECU需要兩路CAN,CAN1用于ECU之間的信息交互,CAN2用于診斷和標定
為什么ECU通常需要兩路CAN或者更多?主要考慮因素有CAN總線的負載率以及功能需求等。所以O(shè)EM定義一路用作通訊,比如動力總成域上掛VCU, MCU, BMS 和OBC等。另一路則用于車輛的標定和診斷通訊功能,其中標定功能在量產(chǎn)會被禁用,這路CAN與OBD接口相連,如下所示:
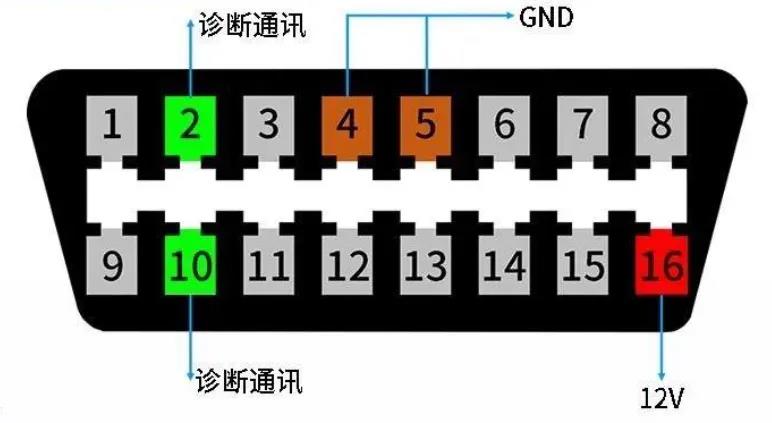
當然也有有些控制器只有1路CAN,既用于通訊也用于診斷標定,比如有些電子泵產(chǎn)品。
對于這條需求,該如何評估,考慮點有:
- 主要評估當前的控制器硬件是否滿足,即從接插件Pin數(shù)量是否足夠提供兩路CAN_H和CAN_L;
- PCB是否有足夠空間布置兩顆CAN收發(fā)器及其相應(yīng)的處理電路;
- 微控制器芯片中CAN控制器數(shù)量是否足夠。

因此實現(xiàn)的關(guān)鍵點在于硬件,而對于軟件來說,主要涉及工作量。
2.2 兩路CAN都為CAN FD,仲裁段波特率500Kbps,數(shù)據(jù)段波特率為2Mbps,采樣點均為80%,都支持標準幀和擴展幀格式;
對于這條需求,考慮因素有兩個方面:
- 一方面是控制器硬件,即CAN收發(fā)器和MCU的CAN控制器需要支持CAN FD;
- 另一方面是控制器軟件,CAN通訊功能模塊需要支持CAN FD報文的處理。
- 另外針對CAN數(shù)據(jù)幀格式,傳輸速率及采樣,主要涉及軟件開發(fā)的內(nèi)容,另外可能需要確保測試設(shè)備支持CAN FD的測試驗證。
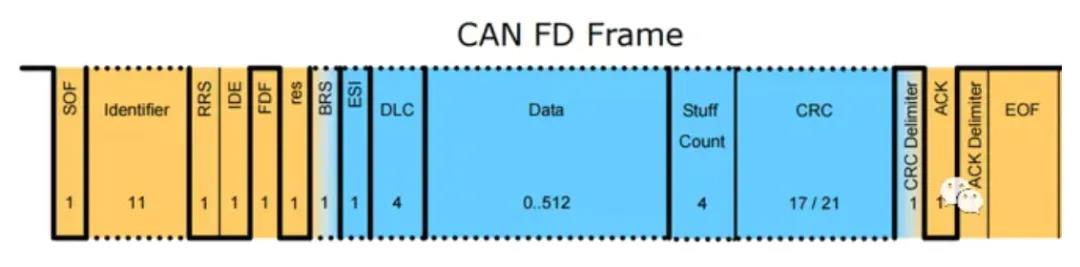
source:CANFD an introduction, from Vector
為了更好地理解這些需求,這里對這些術(shù)語稍作解釋:
- CAN FD的可變速率。CAN FD采用了兩種位速率:從控制場中的BRS位到ACK場之前(含CRC分界符)稱為數(shù)據(jù)段速率,如上圖藍色部分,其余部分仲裁段速率。兩種速率各有一套位時間定義寄存器,它們除了采用不同的位時間單位TQ外,位時間各段的分配比例也可不同,所以兩者可以設(shè)置不同的波特率和采樣點。500Kbps表示1秒鐘可以傳輸500,000bit的數(shù)據(jù),2000Kbps表示1秒鐘可以傳輸2000,000bit的數(shù)據(jù)。
- 標準和擴展格式的數(shù)據(jù)幀。兩者的區(qū)別在仲裁段,標準格式的仲裁段包含11位基本ID位和RTR位,而擴展格式的仲裁段除了11位基本ID位和RTR位外,還包含SRR位,IDE位和18位擴展ID位。即標準格式可表示的CAN ID(11位)范圍為 0X000~0X7FF,而擴展格式可表示的CAN ID(29位)范圍為0X00000000~0X1FFFFFFF。如下所示:
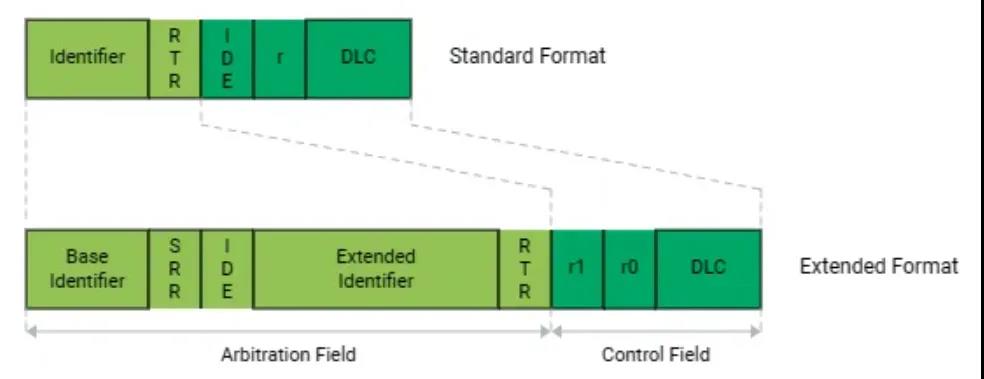
source:CAN_E: Data Frame (vector.com)
2.3 CAN1需要根據(jù)已提供的CAN通訊矩陣或DBC進行開發(fā)
主要工作內(nèi)容在軟件,包括CAN驅(qū)動的配置,CAN報文的收發(fā),CAN報文信號的提取和轉(zhuǎn)換等。對于CAN通訊矩陣中的信號不再做詳細解釋,這里了解下報文中包含保護或校驗信息,比如校驗和(Checksum)和滾動計數(shù)器(Rolling Counter)。
- Checksum。它是用來判斷CAN報文傳輸過程是否會出現(xiàn)錯誤,報文的發(fā)送方采用特定的Checksum校驗算法計算一條報文的CRC校驗碼,再將該校驗碼放到該報文數(shù)據(jù)中,與報文中的其他信號一起發(fā)送到CAN總線。然后報文的接收方會讀取到該校驗碼,同時采用相同的Checksum校驗算法計算出CRC校驗碼,再對比這兩個校驗碼,如果一致,則說明報文傳輸過程沒有出現(xiàn)錯誤,否則認為報文傳輸過程有誤,這條報文有問題。
- Rolling counter。它是用來判斷報文傳輸過程是否出現(xiàn)丟幀,報文的發(fā)送方發(fā)送一條報文就計數(shù)器加1,從0累加到15,然后不斷循環(huán)。如果出現(xiàn)計數(shù)器不連續(xù)或首尾值不對,報文的接收方會認為丟幀。
其實對于整個CAN通訊需求開發(fā)內(nèi)容,CAN通訊矩陣涉及內(nèi)容最多,并且貫穿整個軟件開發(fā)的周期。
2.4 CAN1需要支持特定幀報文喚醒,支持局部網(wǎng)絡(luò)喚醒功能等
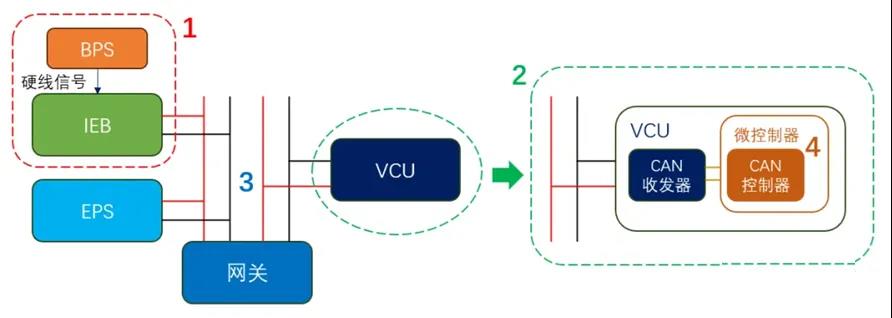
對于這條需求,需求明確要特定幀報文喚醒功能,即對控制器硬件設(shè)計有要求,選用的CAN收發(fā)器芯片要支持特定幀喚醒。其次需求要求支持局部網(wǎng)絡(luò)喚醒功能,因此涉及到復(fù)雜的網(wǎng)絡(luò)管理策略。以底盤域的網(wǎng)絡(luò)喚醒例子來理解,如下所示:
Source:一篇易懂的整車網(wǎng)絡(luò)管理指南
一個ECU可能存本地喚醒和網(wǎng)絡(luò)喚醒等,比如上圖中假設(shè)IEB的本地喚醒源是制動踏板行程傳感器BPS,即某個喚醒場景下,BPS感知到變化,以硬線信號形式傳給IEB,那么處于休眠的IEB將被喚醒,對應(yīng)著圖中1區(qū)域。IEB喚醒后將請求喚醒EPS和VCU參與功能控制,這部分與網(wǎng)絡(luò)喚醒策略相關(guān)。
以上就列舉了一個典型的網(wǎng)絡(luò)管理場景,要實現(xiàn)這樣的場景,會涉及幾個方面內(nèi)容:
- 喚醒功能邏輯需求,以怎樣的邏輯精準識別喚醒源;
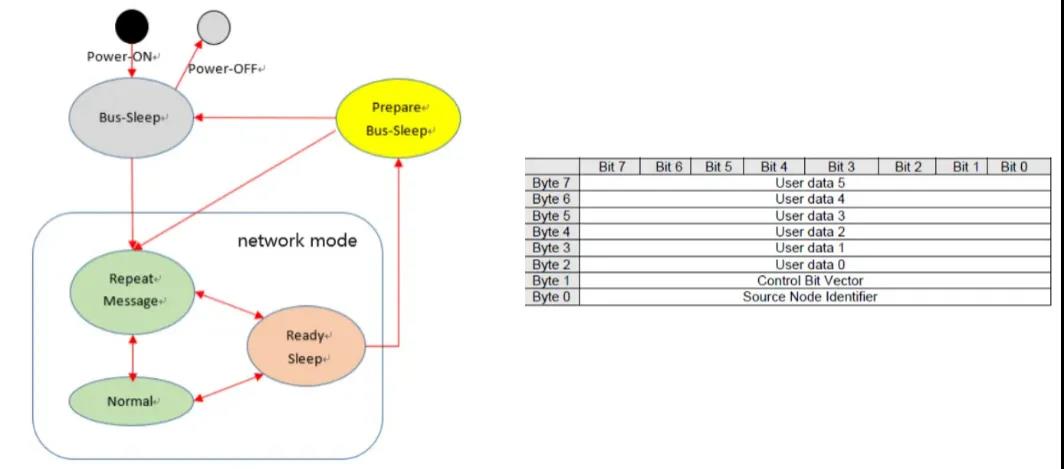
- 網(wǎng)絡(luò)管理狀態(tài)機需求,采用怎么樣形式,AutoSAR NM嗎?以及狀態(tài)之間的跳轉(zhuǎn)條件和每個狀態(tài)下的動作是怎樣定義的;
- 網(wǎng)絡(luò)管理報文需求。網(wǎng)絡(luò)管理報文內(nèi)容是怎么定義,接收與發(fā)送的規(guī)則是怎樣的等。
上述這些內(nèi)容喚醒源檢測會涉及到硬件設(shè)計,在硬件具備的情況下,那么開發(fā)的內(nèi)容均由軟件來實現(xiàn)。關(guān)于網(wǎng)絡(luò)管理需求的實現(xiàn),除了單個ECU自身需求實現(xiàn),其實與其他ECU強相關(guān),因為這些喚醒場景由這些ECU共同實現(xiàn)。
#03 CAN通訊需求總結(jié)
當然還有很多CAN通訊需求本文還未提及展開,比如:
- CAN總線Bus off處理需求;
- CAN報文的診斷需求,比如ID檢測,超時檢測,Checksum校驗和故障后處理措施等;
- 功能安全相關(guān)的E2E保護需求。
總之,CAN通訊其實是一個非常大的話題,內(nèi)容非常多非常復(fù)雜,不管在主機廠還是供應(yīng)商,不管是ECU系統(tǒng)還是ECU軟硬件,都有很多相關(guān)的工作需要做,很多細節(jié)需要把控,更多CAN通訊內(nèi)容,歡迎持續(xù)關(guān)注。
轉(zhuǎn)自汽車電子與軟件
