摘要:
在過去的二十年中,汽車軟件的需求和應(yīng)用急劇增長,隨之復(fù)雜性急劇上升,現(xiàn)有技術(shù)和框架不足以應(yīng)對這種復(fù)雜性。現(xiàn)在很明顯,汽車制造商(OEM)必須重新考慮他們生產(chǎn)車輛的方式以及車輛本身的生命周期。通過將重點放在軟件上,OEM可以在車輛整個生命周期中實現(xiàn)許多新的應(yīng)用用例,并打開一個充滿機遇的新世界。
01.軟件定義汽車以及虛擬化技術(shù)
1.1 軟件定義汽車的概念
移動出行時代,汽車已逐漸從純粹由機械驅(qū)動的硬件轉(zhuǎn)變?yōu)檐浖?qū)動的電子產(chǎn)品。當(dāng)今不同車廠的產(chǎn)品硬件配置已逐漸趨同,在成本和功能改善空間有限的情況下,傳統(tǒng)汽車價值鏈的重構(gòu)勢在必行。車廠打造差異化的核心要素已轉(zhuǎn)向原先與硬件深度耦合的汽車軟件,隨著汽車軟件在新能源和智能化領(lǐng)域不斷取得成功,邁入“軟件定義汽車(Software Defined Vehicles,SDV)”時代已成為行業(yè)共識。“軟件定義汽車”即軟件將深度參與到汽車的定義、開發(fā)、驗證、銷售、服務(wù)等過程中,并不斷改變和優(yōu)化各個過程,是汽車從基于硬件的產(chǎn)品向軟件為中心的電子設(shè)備不斷轉(zhuǎn)變的結(jié)果。
“軟件定義汽車” 從表面上看是車內(nèi)軟件(包括電子硬件)的數(shù)量、價值超過機械硬件,背后更多的反應(yīng)了汽車從高度機電一體化的機械終端,逐步轉(zhuǎn)變?yōu)?/span>一個智能化、可拓展、可持續(xù)迭代升級的移動電子終端。為實現(xiàn)這一目標(biāo),整車在標(biāo)準(zhǔn)操作程序前便預(yù)埋了性能超前的硬件,并通過OTA在生命周期中逐步解鎖和釋放功能和價值。在該背景下,主機廠的核心能力將從機械硬件轉(zhuǎn)向電子硬件和軟件;產(chǎn)業(yè)價值鏈也將從一錘子硬件銷售轉(zhuǎn)向持續(xù)的軟件及服務(wù)溢價。
1.2 汽車軟件發(fā)展的趨勢

汽車“新四化”離不開軟件和算法隨著新四化的深入發(fā)展,汽車正加速從從機械設(shè)備向高度數(shù)字化、信息化的智能終端轉(zhuǎn)變。
首先,軟件及汽車電子占整車的研發(fā)成本逐步提高,車內(nèi)軟件和電子硬件價值有望超過硬件,成為整車價值的核心。據(jù)測算,預(yù)計到2030年軟件成本占整車BOM(物料清單,Bill Of Material)的比重將從目前不到10%增長到50%。需指出的是,這里的軟件除應(yīng)用程序開發(fā)、還包括AI算法、操作系統(tǒng),以及軟硬件一體化程度高的控制器、芯片等電子硬件。
其次,軟件及軟件更迭所帶來的性能和功能變化,將決定未來汽車的差異性。軟件的更新維護是未來主機廠提供差異化體驗、提升客戶滿意度最經(jīng)濟、最便捷、最快速的一種方式。前提是由硬件提供冗余,再由軟件實現(xiàn)迭代。
最后,包括主機廠、零部件企業(yè)等產(chǎn)業(yè)鏈上企業(yè)將加強軟件能力建設(shè),并圍繞“軟件定義汽車”開啟從產(chǎn)品開發(fā)模式、組織架構(gòu)、人員構(gòu)成、運營體系等的內(nèi)部變革。此外,新興的軟件公司將借助軟硬件協(xié)同能力,兼容產(chǎn)業(yè)鏈上下多方需求,一舉躍升為汽車產(chǎn)業(yè)鏈上新的Tier-1企業(yè)。
1.3 汽車研發(fā)面臨的困局
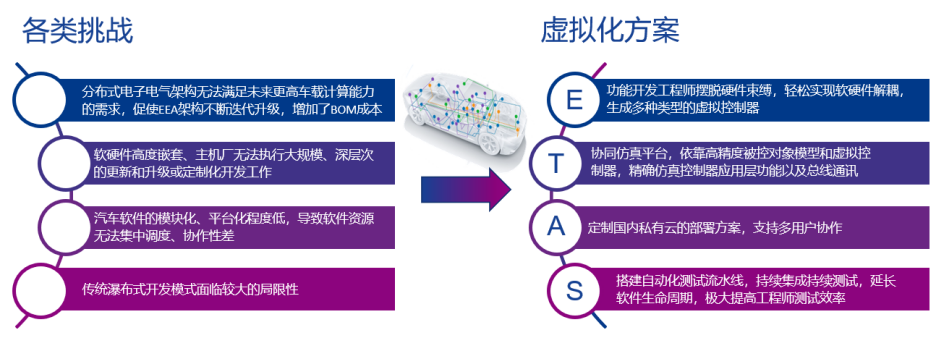
首先,分布式電子電氣架構(gòu)無法滿足未來更高車載計算能力的需求。驅(qū)使EEA架構(gòu)升級的另一個推動因素來自于更高的通訊效率和更大的帶寬容量需求。成本管控黑洞:隨著車內(nèi)ECU、傳感器數(shù)量增加,整車線束成本和布線難度也跟著大幅提升。
另外,汽車軟件的模塊化、平臺化程度低,導(dǎo)致軟件資源無法集中調(diào)度、協(xié)作性差。主機廠的ECU通常來自于不同的零部件供應(yīng)商,事實上控制器上許多底層軟件的重復(fù)性很高,這些代碼主要保障控制器的正常運行,例如CAN總線信號的收發(fā)、任務(wù)進程的調(diào)度、Flash數(shù)據(jù)的讀寫等等。但礙于每一家供應(yīng)商的軟件編程語言不同、接口標(biāo)準(zhǔn)不同,而且軟件又和硬件高度依賴,使得這些底層代碼無法被復(fù)制和移植,從而造成ECU軟件開發(fā)的大量重復(fù)和資源利用的低效。其次,軟硬件高度嵌套、主機廠無法執(zhí)行大規(guī)模、深層次的更新和升級或定制化開發(fā)工作。分布式軟件架構(gòu)是一種面向信號的架構(gòu),控制器之間通過信號來傳遞信息,但整個系統(tǒng)是封閉、靜態(tài)的,在編譯階段就被定義死,因此當(dāng)發(fā)生例如主機廠要修改或增加某個控制器的功能定義,同時該指令還必須調(diào)用另一個控制器上的功能時,就不得不把所有需要的控制器都升級,大大延長開發(fā)周期、增加開發(fā)成本。
1.4 研發(fā)模式的轉(zhuǎn)變
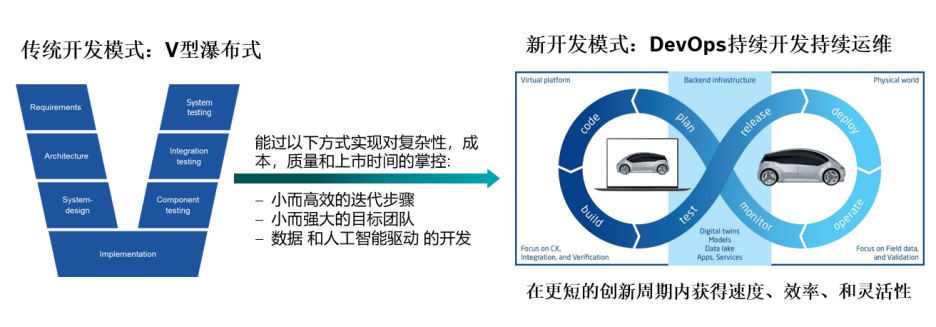
基于以上技術(shù)架構(gòu)方面的變化,在軟件定義汽車的背景下,汽車研發(fā)將由傳統(tǒng)的瀑布式開發(fā)向敏捷開發(fā)的模式轉(zhuǎn)變。
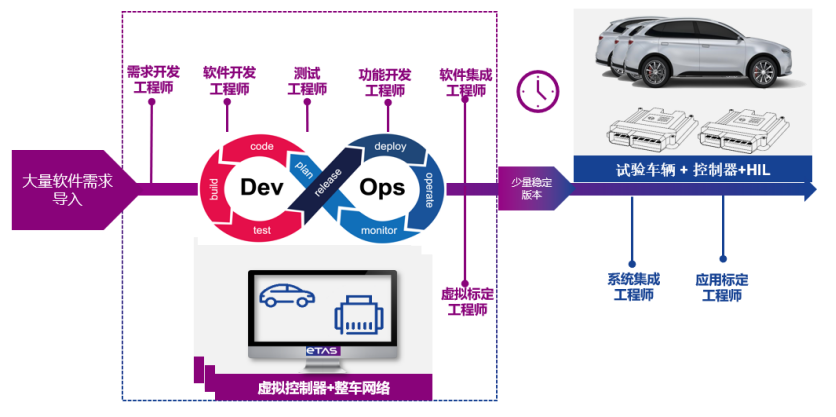
敏捷軟件開發(fā)(Agile software development):包括需求發(fā)現(xiàn)和解決方案改進。該模式通過自組織和跨職能團隊與用戶協(xié)作,制定適應(yīng)性計劃,進行漸進開發(fā)、早期交付、持續(xù)改進,靈活應(yīng)對需求、能力的變化以及對需要解決問題的理解的變化。這是一種以用戶需求進化為核心的迭代、循序漸進的開發(fā)方法。工程師先將用戶最關(guān)注的軟件原型做出來進行交付,根據(jù)用戶在實際場景中反饋的問題,快速修改彌補需求中的不足。上述過程不斷迭代,直至用戶滿意。DevOps是一組過程、方法和系統(tǒng)的統(tǒng)稱,集文化理念、實踐、工具于一身,重視開發(fā)(Dev)和運維(Ops)和質(zhì)量(QA)部門之間的溝通合作。與傳統(tǒng)軟件開發(fā)模式系相比,DevOps打破了開發(fā)和運維之間的壁壘,通過自動化“軟件交付”和“架構(gòu)變更”的流程,使得軟件的構(gòu)建、測試和發(fā)布能更加快捷、頻繁和可靠,從而幫助團隊更快地發(fā)展和改進產(chǎn)品、服務(wù)客戶、高效參與市場競爭。
1.5 虛擬化的價值
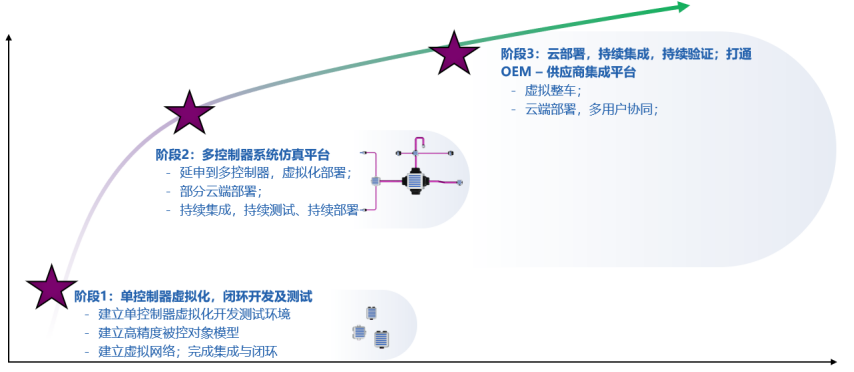
汽車軟件開發(fā)將遵循IT行業(yè)的發(fā)展規(guī)律,引入中間件技術(shù)、虛擬化技術(shù)來實現(xiàn)軟件模塊化、硬件抽象化和標(biāo)準(zhǔn)化,從而進一步解鎖軟硬件的耦合關(guān)系,滿足電子電氣架構(gòu)靈活、可拓展的需求。為應(yīng)對流程轉(zhuǎn)變上的挑戰(zhàn),開發(fā)團隊可考慮將軟硬件解耦后,硬件和軟件部分各自按照獨立時間線來開發(fā),并在進行軟件更改后無需對整個車輛進行重新驗證,純軟件的開發(fā)和驗證過程從原型車或者硬件在環(huán)測試過渡到軟件在環(huán)(SiL)的測試和驗證。這種軟硬解耦的方式同時也迎合了當(dāng)下將ECU功能整合到中央計算單元或域控制器的趨勢,在多合一控制器融合的過程中發(fā)揮作用,軟硬件模塊可以在不同的硬件平臺運行,并在車輛整個生命周期內(nèi)更新。 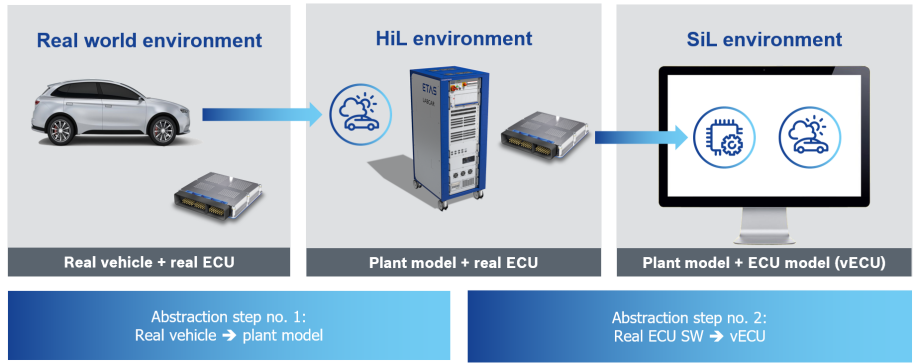
那么軟件在環(huán)SiL有什么應(yīng)用場景呢?其應(yīng)用場景通常是在快速變更的功能需求下敏捷開發(fā)及快速迭代。要求盡早進行軟件驗證并發(fā)現(xiàn)和糾正代碼中的重要錯誤,特別是涉及安全相關(guān)錯誤。在高頻率OTA云端升級軟件的情況下自動化持續(xù)驗證。在以上場景下軟件在環(huán)SIL測試能夠脫離硬件而快速驗證控制器的功能代碼。
軟件在環(huán)SiL的最關(guān)鍵的一個核心就是虛擬化:即通過將真實控制器轉(zhuǎn)化為虛擬控制器,部署到PC上集成環(huán)境和聯(lián)合仿真平臺,接入CI/CT/CD自動化流水線,并上云端進行大規(guī)模測試,從而搭建完整的DevOps的SiL平臺。
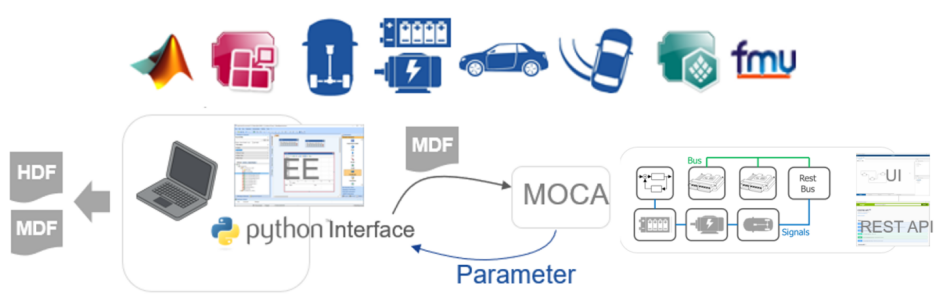
虛擬化技術(shù)使得在Windows PC上對汽車ECU(Electronic Control Unit,電子控制器單元)進行閉環(huán)仿真成為可能,能有效改善ECU開發(fā)過程。一些開發(fā)任務(wù)得以從道路、測試平臺和HIL(Hardware in the Loop,硬件在環(huán))轉(zhuǎn)移到PC上,縮短開發(fā)時間和成本。從OEM的視角來看虛擬化,可以將軟件測試前移到早期開發(fā)階段閉環(huán),既減少了項目初期昂貴的BOM成本,又降低了軟件開發(fā)成本和時間,在實現(xiàn)軟件CICT閉環(huán)自動化的同時,可以建立供應(yīng)商之間的發(fā)展生態(tài)系統(tǒng),進行多團隊多租戶并行工作。從工程師的視角來看虛擬化,傳統(tǒng)汽車軟件開發(fā)的流程一般為:功能開發(fā)團隊使用基于模型的工具鏈開發(fā)ECU模型,生成C代碼,然后針對目標(biāo)處理器進行代碼編譯,并使用測試平臺,HiL系統(tǒng)和道路測試來測試和驗證生成的ECU,進而將結(jié)果反饋至開發(fā)人員,結(jié)束開發(fā)周期。該過程存在的主要缺點有:迭代時間長,受原型車和測試設(shè)備的限制—硬件資源昂貴且稀缺。為開發(fā)團隊提供虛擬ECU可解決上述問題:開發(fā)人員可在PC機上對軟件進行模擬、校準(zhǔn)和測量,縮短開發(fā)周期,減少對稀缺資源和實際硬件的嚴重依賴;同時,通過虛擬ECU,開發(fā)人員可隨時觀察和修改內(nèi)存變量甚至硬件狀態(tài),極大提升工作效率。 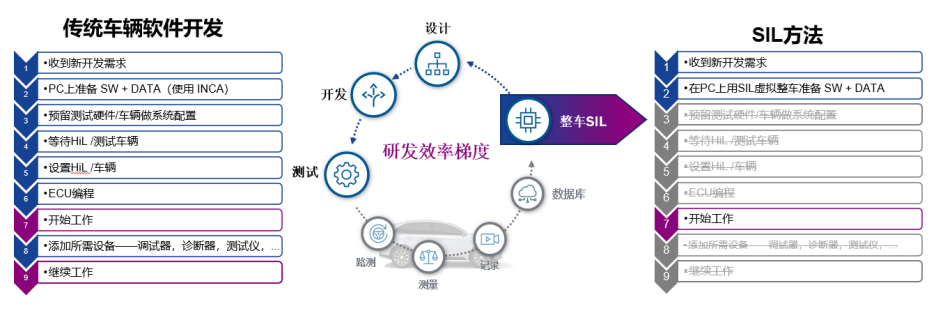
2.1 虛擬控制器的介紹
虛擬控制器簡稱vECU (即Virtual ECU),表示脫離真實硬件依賴后基于PC獨立編譯和運行的軟件,vECU所包含的內(nèi)容通常可由ASW,vBSW,vCDD以及RTE這幾個部分構(gòu)成,在集成編譯后封裝成基于PC的可執(zhí)行文件。
對于功能測試驗證工程師,通常他會拿到一個帶有軟件的完整ECU控制器,并以硬件在環(huán)或?qū)嵻嚟h(huán)境作為測試環(huán)境進行測試,整個測試過程可能受硬件和線束的限制,每當(dāng)遇到軟件的失效時首先需要考慮線束或者硬件通信上的問題,長此以往測試效率通常受硬件資源和硬件狀態(tài)的限制,難以在受限的條件下高效的完成測試。但是如果僅ECU內(nèi)與硬件無關(guān)的功能,只需解耦ECU產(chǎn)品代碼并封裝成vECU運行在PC上進行測試即可。數(shù)據(jù)采集和驗證過程同真實環(huán)境軟件測試工具一致,如INCA、Debugger調(diào)試器等等。
而對于功能開發(fā)工程師來說,驗證功能時需要在完整ECU軟件上進行集成并驗證功能,該集成過程通常由軟件集成工程師負責(zé),軟件集成該功能同時還需要考慮ECU 平臺化升級、底層芯片配置等諸多因素導(dǎo)致迭代效率低下的問題。其實對于其生成的ECU功能代碼,依然可以將這一部分代碼封裝成一個部分功能的vECU并進行仿真測試。并且你可以在任意時間終止仿真并進行Debug,還可以在功能驗證過程中根據(jù)需要對vECU做預(yù)標(biāo)定從而提前驗證預(yù)設(shè)標(biāo)定數(shù)據(jù)。
簡而言之,就是將控制器C代碼基于PC環(huán)境編譯后生成FMU格式的可執(zhí)行文件運行在常規(guī)PC仿真環(huán)境上,以更早和更快的方式進行測試及調(diào)試。
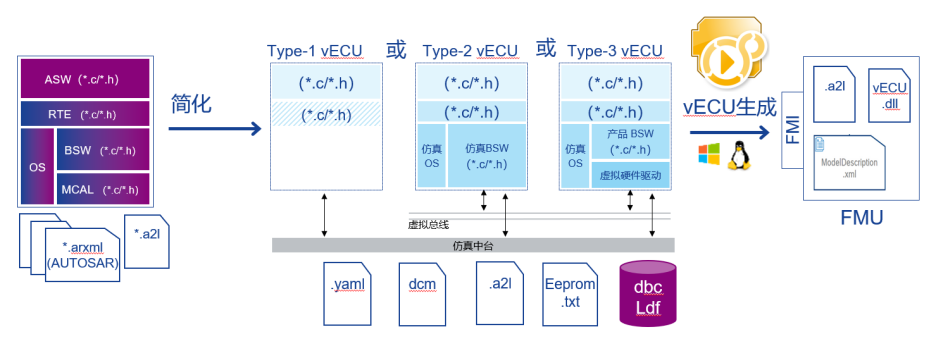
2.2 虛擬控制器的分類
生成虛擬控制器的方式有兩種,一種是通過C源碼經(jīng)過PC的x86編譯器后生成可以運行在PC上vECU目標(biāo)文件,并于PC上進行系統(tǒng)測試和驗證后反饋給研發(fā)工程師。另一種是將C源碼編譯成目標(biāo)芯片的程序(hex文件)后,運行在目標(biāo)芯片的指令模擬器上來進行系統(tǒng)測試后再將結(jié)果反饋給研發(fā)工程師。
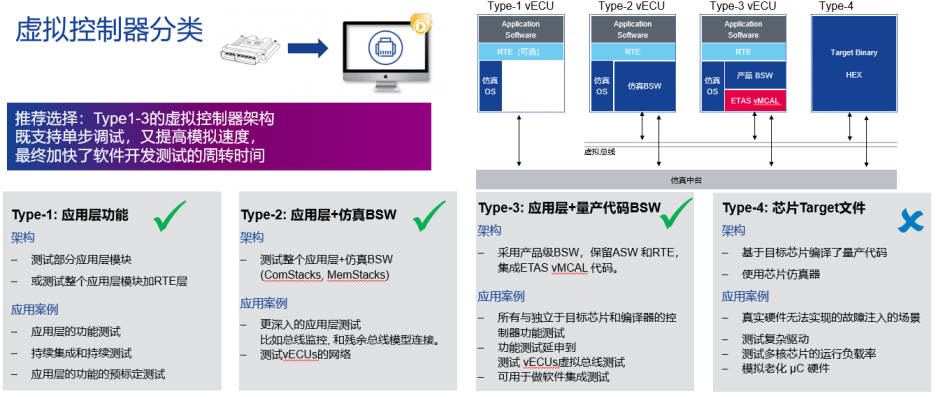
如上圖所示,Type-1 vECU, Type-2 vECU, Type-3 vECU為第一類通過C源碼的構(gòu)建方式生成的vECU,Type-4為第二類通過目標(biāo)程序運行在目標(biāo)芯片指令模擬器的方式實現(xiàn)vECU。Type-4 vECU雖然可執(zhí)行的是同一個目標(biāo)hex文件,但緩慢的運行效率及芯片迭代所帶來大量工程服務(wù)來屏蔽當(dāng)前ECU項目的部分二進制控制指令,當(dāng)前大部分用戶仍會采用基于PC編譯器Type1 Type2 和Type3的方式。基于PC編譯器編譯控制器C代碼的諸多優(yōu)勢,比如:vECU 的更快的運行效率、仿真時的在線Debug、解耦真實硬件以及對實驗結(jié)果更快的反饋時間。 雖然采用vECU來驗證有諸多優(yōu)勢,但用其進行測試和仿真時仍有一定限制,比如無法評估和分析諸如軟件上的時間表現(xiàn)、CPU負載、內(nèi)存資源的消耗以及模擬硬件中斷等特性。
2.3 FMU介紹
FMU是對動態(tài)鏈接庫DLL進行的二次封裝,它是基于FMI協(xié)議進行封裝的模型文件。FMI協(xié)議是獨立于建模軟件的標(biāo)準(zhǔn)接口協(xié)議,可以用于集成不同的軟件建立的不同詳細程度的模型,進行MiL/SiL仿真。
一般商業(yè)化的仿真工具比如 CarSim、CarMaker 、AVL Cruise、Amesim和Simulink 、ASCET等都由官方提供 FMU。在 FMI 官網(wǎng)上列出了目前提供了 FMU 的軟件可以在以下路徑找到https://fmi-standard.org/
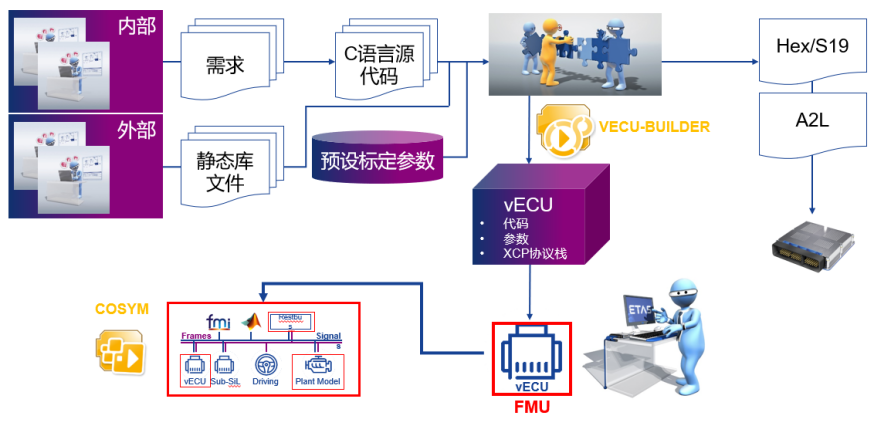
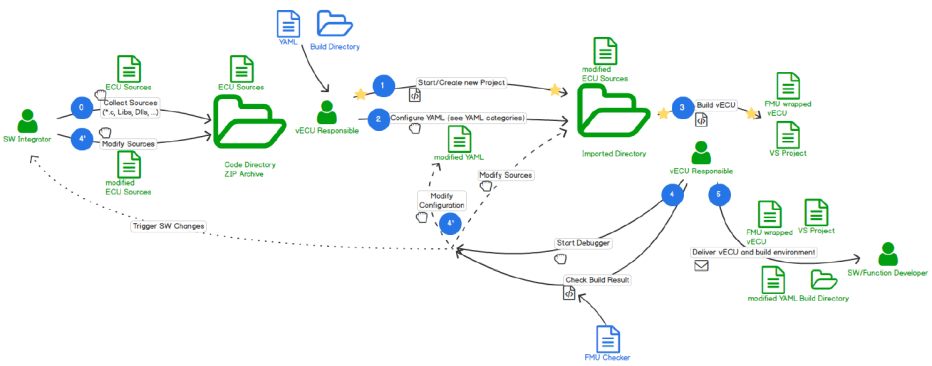
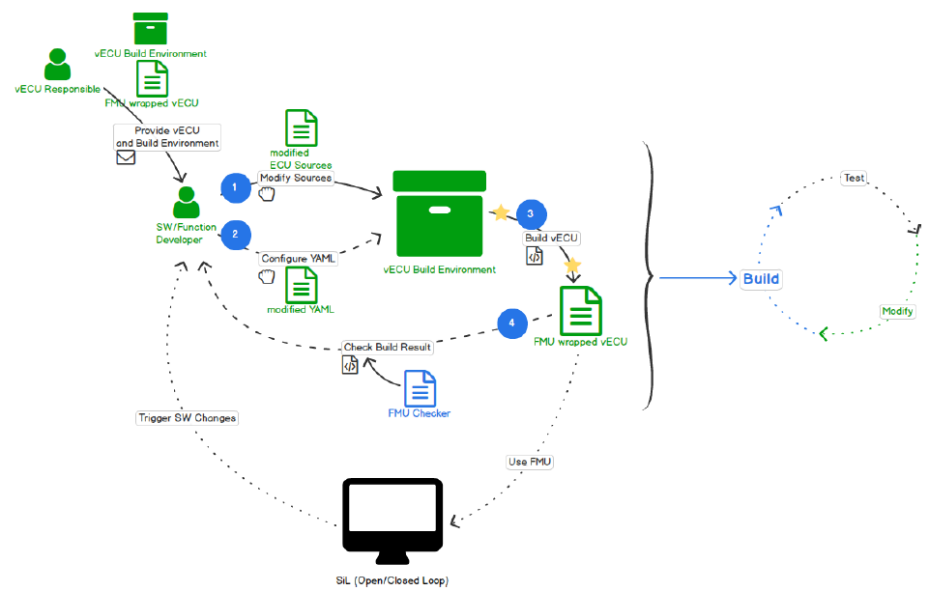
2.4 vECU自動化生成流程
以ETAS的VECU-BUILDER為例,這是一個基于Python和CMake的Windows工具。
03.集成環(huán)境及聯(lián)合仿真
下面介紹一下關(guān)于FMU的集成環(huán)境和聯(lián)合仿真平臺。
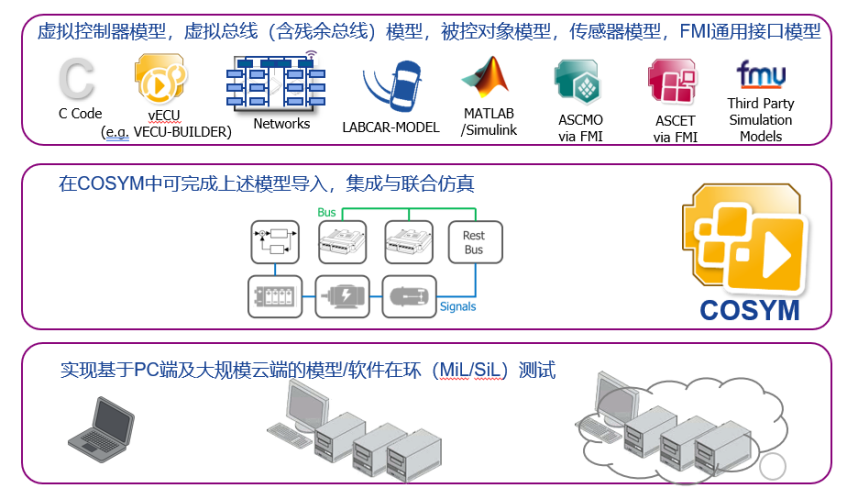
3.1 COSYM介紹
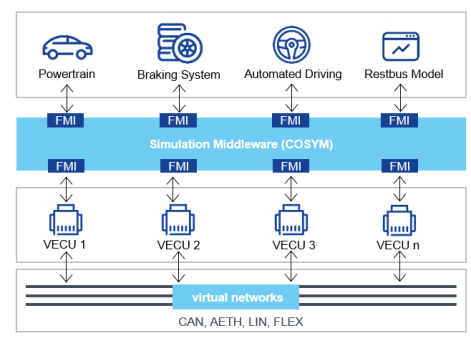
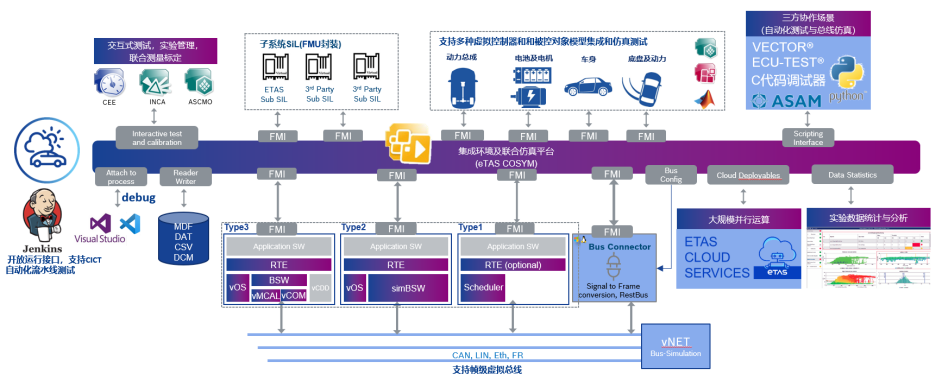
COSYM(系統(tǒng)協(xié)同仿真)產(chǎn)品是一個仿真和集成平臺,作為系統(tǒng)級軟件在環(huán)的主干,能夠方便支持ECU間通信,并使能OEM廠商成為虛擬車輛集成商。一旦OEM廠商開發(fā)了自有的構(gòu)建模塊庫,將能夠方便采用COSYM進行模塊集成與連接,使能控制器之間精確地通信。COSYM具有 “時序主控” ,能夠協(xié)調(diào)所集成模塊時間同步。 COSYM提供了圖形配置界面(GUI)和實時操作環(huán)境(CEE),以實現(xiàn)有效的用戶交互。旨在為用戶提供:
?模塊導(dǎo)入,集成和部署;
?多平臺仿真:
基于Windows的自適應(yīng)時間(ATS),軟實時(MiL/SiL);
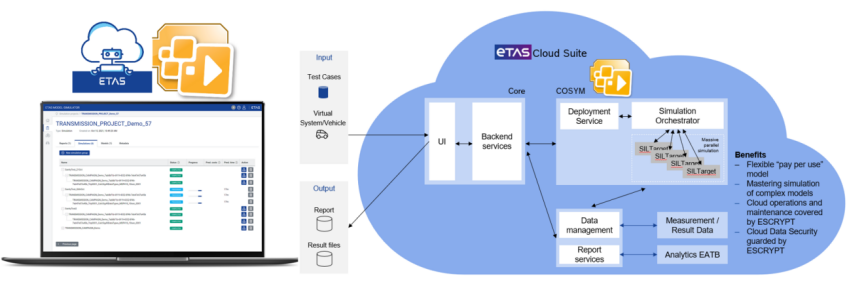
基于云端的并行加速運算(MiL/SiL);
基于Linux的實時仿真(HiL);
?離散和連續(xù)仿真系統(tǒng)的交互操控及結(jié)果可視化(CEE);
?高級程序員/用戶可以使用ASAM XiL和RestAPI(Python接口等)接 口 與COSYM進行交互。
通用模型集成器主要優(yōu)勢:
?通用FMI2.0集成接口,可快速復(fù)用被控對象模型,虛擬控制器模型和幀級虛擬總線模型
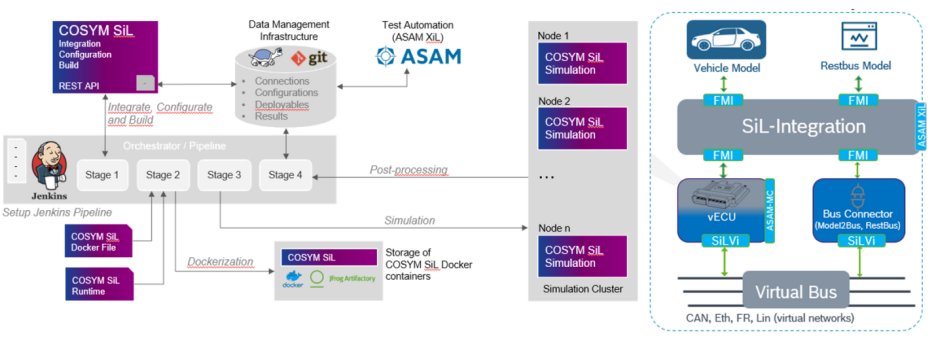
?COSYM提供Rest API,可啟動后臺運行模式,支持自動化流水線工具接入
?可實現(xiàn)基于Windows和Linux*增量編譯,提升集成效率
聯(lián)合仿真器主要優(yōu)勢:
?支持ASAM-XiL標(biāo)準(zhǔn)接口,調(diào)用API即可運行仿真環(huán)境
?支持基于Windows和Linux*系統(tǒng)下的自動化集成測試
?支持基于云原生和容器鏡像技術(shù)的仿真計算
?支持第三方工具交互式測試,例如:測試管理與標(biāo)定工具和總線仿真與信息安全工具功能
3.2 COSYM功能
功能模塊集成:
?COSYM支持用于聯(lián)合仿真的功能模型接口標(biāo)準(zhǔn)(FMI)V2.0;
?提供了用于虛擬ECU(vECU)集成和仿真的環(huán)境;
?建模工具ASCET和ASCMO模型;
?Labcar系列半物理模型,基于Simulink的 模型編譯導(dǎo)入;
?支持模板化的C模塊;
模塊間通信連接:
COSYM 提供了基于CAN/CANFD, 車載以太網(wǎng),FlexRay, LIN的的汽車總線虛擬仿真技術(shù)。基于共享內(nèi)存,該虛擬總線仿真為被動和分散式,分布式系統(tǒng)因此可以由任意數(shù)量的模塊構(gòu)建。不需要真實的網(wǎng)絡(luò)接口,可在虛擬vNet接口上捕獲網(wǎng)絡(luò)流量并將其轉(zhuǎn)發(fā)到真實的網(wǎng)絡(luò)接口。虛擬CAN和車載以太網(wǎng)支持在ISO / OSI第二層級及以上的邏輯總線行為模擬,模擬可到幀的傳輸而非電壓電平。COSYM 可提供vPIN 級別的vECU信號互連插件-虛擬電器層(vEL),以實現(xiàn)例如故障存儲器,EEPROM,通訊堆棧和輸入/輸出的測試驗證;相比真實硬件,該插件簡化或刪除了部分特定硬件和復(fù)雜驅(qū)動程序相關(guān)的仿真。
3.3 COSYM應(yīng)用場景
?虛擬控制器自動尋優(yōu)標(biāo)定(節(jié)能減排)
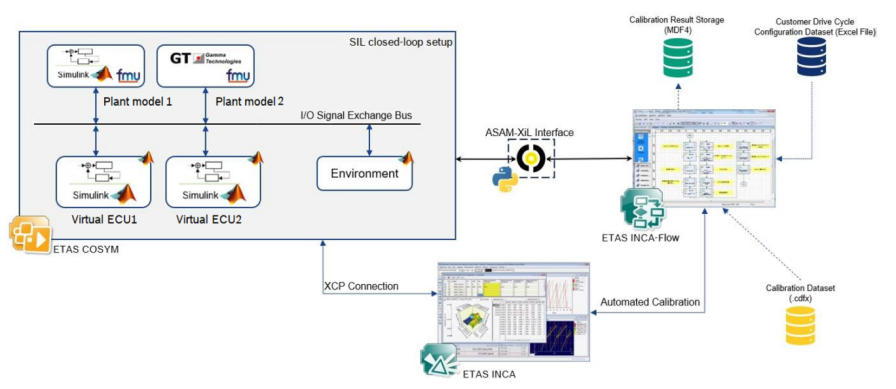
?大規(guī)模云端并行計算及多租戶協(xié)同工作(降本增效)
?虛擬整車及產(chǎn)品級代碼白盒持續(xù)集成與測試(加速迭代)
?被控對象模型自動參數(shù)化(精度提升)